Controllo della Velocità nei Motori ad Induzione AC: Un Approccio Basato su Microcontrollori e PWM
L'automazione industriale e domestica moderna si basa sull'efficienza e sulla precisione. Gli attuatori elettrici, in particolare i motori ad induzione AC, giocano un ruolo cruciale in questo scenario, permettendo un controllo ottimale dei processi, un incremento della produzione e un miglior rendimento degli impianti. La capacità di dosare con precisione la potenza fornita a carichi come pompe e ventilatori si traduce in un considerevole risparmio energetico. Oltre ai benefici economici, la necessità di controllare con estrema accuratezza la posizione o la velocità di rotazione del motore è fondamentale in applicazioni critiche, dall'automazione robotica ai servomeccanismi presenti anche negli oggetti di uso quotidiano, come i lettori CD dove la precisione nel pilotare gli attuatori che controllano la posizione del fascio laser è essenziale.

Principi Fondamentali del Funzionamento del Motore Asincrono
Il funzionamento di un motore asincrono si basa sull'interazione tra le correnti di rotore e i campi magnetici rotanti. L'interazione tra queste componenti genera una coppia elettromagnetica che mette in rotazione il rotore. È importante notare che la velocità del rotore è sempre inferiore alla velocità di sincronismo del campo magnetico statorico; questa differenza, nota come "scorrimento", è intrinseca al funzionamento del motore e necessaria affinché la coppia motrice sia non nulla. Se le due velocità fossero uguali, la coppia del motore sarebbe zero.
Per modificare la velocità di rotazione di un motore asincrono, è possibile intervenire sui fattori che creano la coppia motrice. Questi fattori includono la modifica del campo magnetico risultante, agendo sulle tensioni e correnti statoriche, e/o la variazione delle correnti rotoriche. Nei motori asincroni, tuttavia, l'accesso diretto alle correnti di rotore non è possibile. Pertanto, il controllo si concentra sugli avvolgimenti statorici, variando la tensione e/o la frequenza di alimentazione in funzione della coppia motrice desiderata e del regime di funzionamento.
La Gestione degli Attuatori Elettrici tramite Microcontrollori
Una logica di controllo basata su microcontrollori, come i PIC, consente di aumentare significativamente la potenzialità e la flessibilità degli attuatori elettrici nei sistemi di automazione. Un azionamento elettrico tipicamente comprende un motore (l'attuatore) e un sistema elettronico dedicato all'alimentazione e alla gestione, spesso integrato con sensori di feedback. La scelta della tipologia di attuatore dipende dall'impiego specifico e dalle specifiche del progetto.
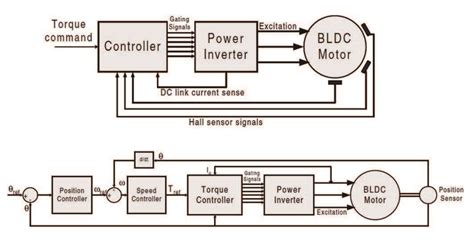
Esaminiamo più in dettaglio il funzionamento di un sistema di controllo, prendendo come esempio una fase del motore. Supponiamo che un interruttore (ad esempio, H1) sia chiuso e un altro (L1) sia aperto. In questa configurazione, la fase sarà percorsa da una corrente con un verso specifico. Se invece L1 è chiuso e H1 è aperto, la corrente nella stessa fase scorrerà in verso opposto. Lo stesso principio si applica alle altre fasi (B e C) attraverso coppie di interruttori complementari (H2/L2 e H3/L3). Queste coppie di interruttori, denominate "half-bridges", pilotano indipendentemente le fasi del motore. È cruciale che i due interruttori di ciascuna coppia non si trovino mai simultaneamente nello stesso stato (entrambi chiusi o entrambi aperti), per evitare cortocircuiti nell'alimentazione.
Generazione di Forme d'Onda Sinusoidali tramite PWM
A prima vista, potrebbe sorgere la domanda su come sia possibile ottenere una forma d'onda sinusoidale per una fase del motore, quando ai suoi estremi vengono applicate tensioni che variano a gradini (alternativamente alte e basse). La risposta risiede nella risposta intrinseca della fase del motore, che non dipende solo dal segnale di ingresso a gradini, ma anche dalle sue caratteristiche elettriche. Questo fenomeno generale è descritto dalla convoluzione tra il segnale d'ingresso e la risposta impulsiva caratteristica del sistema. Nel caso delle fasi del motore, che possono essere modellate come filtri passa-basso, un treno di impulsi di corrente applicato al loro ingresso viene integrato, producendo la forma d'onda sinusoidale desiderata.
GENERATORE PWM[SPIEGAZIONE COMPLETA-ITA]
Questa proprietà permette di sfruttare la risorsa hardware specifica dei microcontrollori, chiamata PCPWM (Power Control PWM), per generare forme d'onda complesse. Il microcontrollore genera un treno di impulsi rettangolari, il cui duty-cycle e frequenza variano in funzione dell'ampiezza e della frequenza delle sinusoidi che si desidera inviare alle tre fasi del motore. Il compito del programmatore è quello di utilizzare questo hardware specializzato o di gestire la creazione degli impulsi tramite software.
Controllo V/f e la sua Implementazione con PIC
Una strategia di controllo ampiamente utilizzata per i motori asincroni è il controllo V/f (Tensione/Frequenza). In questo approccio, il rapporto tra l'ampiezza (tensione) e la frequenza delle sinusoidi generate viene mantenuto costante. Questo garantisce una coppia motrice elevata e il più possibile costante all'interno del range operativo del motore. Si tratta di una forma di controllo economicamente vantaggiosa e relativamente semplice da implementare.
Questo metodo di controllo non richiede un feedback diretto dalla velocità del rotore. La velocità di rotazione del rotore segue il flusso indotto dagli avvolgimenti rotorici e può essere modificata variando la frequenza della sinusoide applicata.
Caratteristiche Avanzate del PCPWM nei Microcontrollori PIC
Il modulo PCPWM integrato in microcontrollori come il PIC18F4431 offre funzionalità avanzate per il controllo motore. Esso dispone di un numero elevato di canali (fino a otto), con la possibilità di generare uscite complementari. La risoluzione del PWM può raggiungere i 14 bit, e i tempi di latenza (dead-time) sono facilmente gestibili e generati in hardware. Inoltre, è possibile variare simultaneamente il duty-cycle e il periodo dell'onda rettangolare, offrendo un controllo flessibile.
È possibile monitorare l'assorbimento complessivo di corrente dei bus di alimentazione tramite una resistenza di shunt. La tensione ai capi di questa resistenza viene inviata a un comparatore connesso a un pin dedicato del PIC (FLTA). In caso di extracorrente (evento di Fault), il sistema può spegnere le uscite PWM e impostare un flag di controllo. Questo permette di apportare modifiche al firmware, come la riduzione della velocità del motore, per proteggere il sistema.
Per chi fosse interessato ad approfondire gli algoritmi di controllo, i testi di elettronica e le risorse online offrono ampie spiegazioni. Gli algoritmi più comuni in questo campo includono il controllo proporzionale, integrale e differenziale (PID) o loro combinazioni. Questi metodi elaborano il segnale di differenza (errore) tra il valore desiderato e quello effettivo per determinare il nuovo valore di frequenza e, di conseguenza, di ampiezza del segnale PWM.
Implementazione Software e Gestione dei Registri
Il nucleo principale del codice per il controllo motore è dedicato alla generazione dei segnali PWM. La periferica PCPWM integrata nel PIC semplifica questo compito, richiedendo la programmazione di specifici registri (come PDCxH:PDCxL) per impostare il duty-cycle e ottenere la forma d'onda sinusoidale desiderata.
La frequenza del segnale PWM generato è tipicamente molto più elevata (decine di kHz) rispetto alla frequenza dell'onda sinusoidale che si vuole generare (decine di Hz). Per questo motivo, il microcontrollore "vede" la sinusoide come composta da numerosi tratti costanti intervallati da periodi PWM. La sinusoide viene quindi "campionata" e i valori corrispondenti vengono memorizzati in una tabella (sine-table) nella memoria dati, per un accesso rapido durante l'inizializzazione. La velocità con cui questi valori di duty-cycle vengono modificati determina la frequenza della tensione generata: un cambiamento più rapido dei valori si traduce in una maggiore pulsazione.
Applicazioni e Potenza Gestibile
L'utilizzo di componenti elettronici avanzati, come tiristori bidirezionali ad alta potenza capaci di gestire correnti fino a 25 ampere, permette di risolvere problemi di sovracorrente in applicazioni specifiche. Ad esempio, in forni elettrici, dove la resistenza elettrica del filo può diventare troppo bassa in condizioni di raffreddamento, questi componenti assicurano un funzionamento sicuro. La tensione di uscita della rete può essere regolata in modo efficiente.
Le applicazioni tipiche di tali sistemi includono:
- Forni elettrici
- Riscaldatori ad acqua
- Regolazione dell'illuminazione (dimmerazione)
- Regolazione della velocità di piccoli motori
- Regolazione della temperatura di ferri da stiro elettrici
Questi sistemi permettono di ottenere effetti di dimmerazione, regolazione della temperatura e persino regolazione della pressione. Elettrodomestici di grandi dimensioni che richiedono una potenza inferiore a 2000 watt sono generalmente adatti per l'uso in contesti domestici comuni o in piccole fabbriche.