
Motori Passo-Passo con Albero Tagliato: Caratteristiche e Applicazioni Rivoluzionarie
I motori passo-passo, noti anche come "stepper", rappresentano una soluzione tecnologica di grande rilievo nel panorama dell'automazione industriale e della robotica. La loro intrinseca capacità di suddividere un giro completo del rotore in un numero definito di passi discreti li rende ideali per applicazioni che richiedono un controllo preciso del movimento angolare e della velocità. Questa caratteristica li distingue da altre tipologie di motori, permettendo un controllo in catena aperta, ovvero senza la necessità di sensori di feedback per monitorare la posizione o la velocità. La loro compattezza, affidabilità e costi relativamente contenuti ne fanno una scelta diffusa in un'ampia gamma di realizzazioni.
La Struttura Fondamentale del Motore Passo-Passo
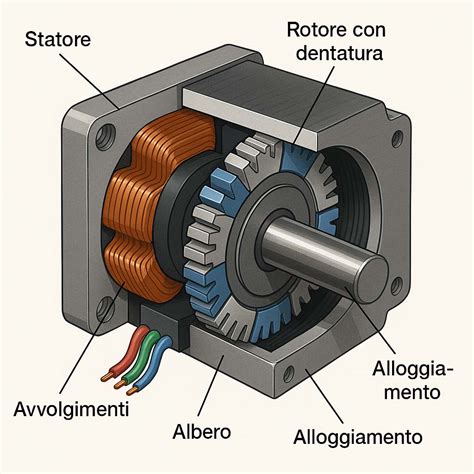
Ogni motore passo-passo, indipendentemente dalla sua specifica configurazione, è composto da due elementi principali: uno statore e un rotore. Lo statore, parte fissa del motore, è costituito da avvolgimenti elettrici e da un nucleo magnetico, spesso caratterizzato da "espansioni polari". Il rotore, la parte mobile, è realizzato con materiali magnetici permanenti, come neodimio o ferrite, e presenta una struttura a "ruote dentate" o "coppette" magnetizzate. Nei motori ibridi, una delle tipologie più diffuse e performanti, il rotore è composto da due ruote dentate permanentemente magnetizzate, sfasate tra loro di mezzo passo. Questa particolare disposizione delle "coppette" magnetiche, insieme alla struttura dello statore con i suoi denti, è ciò che definisce la precisione del posizionamento.
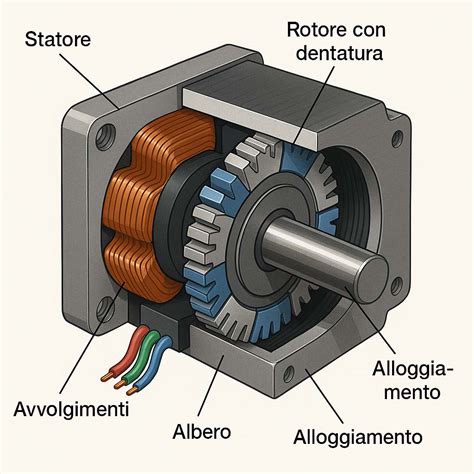
Il numero di denti sul rotore e il numero di poli dello statore determinano il numero di passi per giro, un parametro costruttivo fondamentale che indica la risoluzione dell'albero in termini di posizionamento. Ad esempio, una comune configurazione prevede 50 denti sul rotore. Le altre coppie di espansioni polari nello statore sono sfalsate tra loro di frazioni del passo dei denti, garantendo la sequenza di eccitazione degli elettromagneti che determina la rotazione.
Una caratteristica distintiva dei motori passo-passo, in particolare quelli bipolari, è l'assenza di fili o contatti striscianti sul rotore. Questa assenza contribuisce significativamente alla robustezza del motore e prolunga la sua vita operativa rispetto ai motori dotati di spazzole o contatti striscianti, che sono soggetti a usura.
Tipologie di Motori Passo-Passo
I motori passo-passo si suddividono tradizionalmente in tre categorie principali:
- Motori a Magnete Permanente (PM): In questi motori, il rotore è costituito da un magnete permanente con poli nord e sud alternati. Lo statore ha avvolgimenti che, quando eccitati, creano campi magnetici che interagiscono con il rotore, inducendone la rotazione.
- Motori a Riluttanza Variabile (VR): Questi motori utilizzano un rotore in materiale ferromagnetico privo di magnetizzazione permanente. La rotazione avviene sfruttando la tendenza del rotore a portarsi nella posizione di minima riluttanza magnetica rispetto ai campi generati dallo statore.
- Motori Ibridi: Come accennato, questa è la tipologia attualmente più diffusa e performante. Combinano le caratteristiche dei motori a magnete permanente e a riluttanza variabile, offrendo coppie più elevate e un intervallo di velocità più ampio. Il loro design, con avvolgimenti dello statore più complessi, permette di raggiungere valori di prestazioni superiori.
Configurazioni di Cablaggio e Pilotaggio
Le tecniche di pilotaggio dei motori passo-passo dipendono dalla loro configurazione interna e dal numero di fili di collegamento. Sebbene sia comune riferirsi a motori a quattro o sei fili, è importante chiarire che le fasi di un motore passo-passo sono sempre e soltanto due.
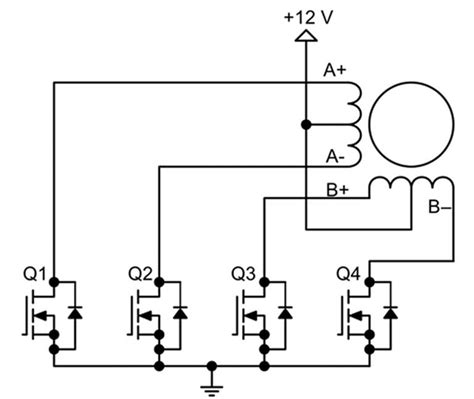
- Motori a sei fili (Unipolari): Questi motori sono comunemente definiti "unipolari" perché la corrente nelle bobine di ogni fase scorre sempre nello stesso verso, anche se è possibile pilotarli con driver bipolari. Un driver unipolare gestisce questi motori eccitando sequenzialmente le bobine. Ad esempio, eccitando contemporaneamente i transistor Q2 e Q4 in un driver unipolare, la corrente fluisce attraverso la fase A e la fase B, inducendo un passo di rotazione in senso antiorario.
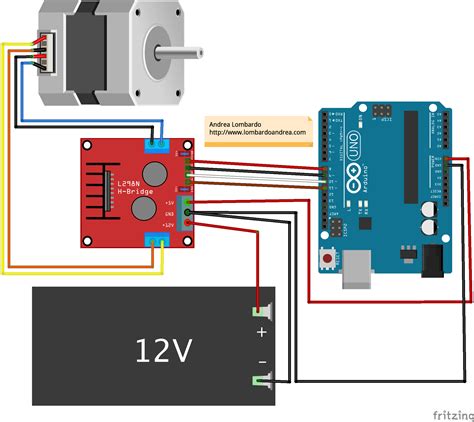
- Motori a quattro fili (Bipolari): Questi motori, definiti "bipolari", possono essere pilotati esclusivamente da un driver bipolare, tipicamente implementato tramite un H-Bridge. Il pilotaggio avviene invertendo la direzione della corrente nelle bobine dello statore per ottenere la rotazione.
La scelta del driver e della tecnica di pilotaggio (full-step o half-step) influisce direttamente sulla fluidità del movimento e sulla risoluzione del posizionamento.
Modalità di Pilotaggio Full-Step e Half-Step
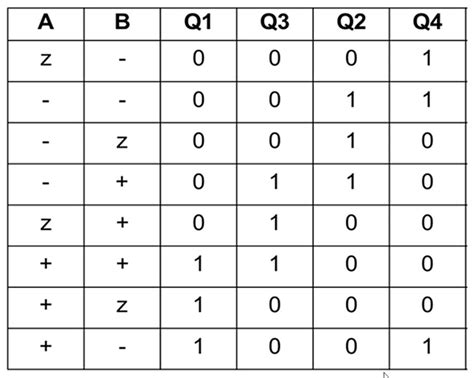
- Full-Step: In questa modalità, vengono eccitate contemporaneamente una coppia di bobine. Ad esempio, accendere Q2 e Q4 nel driver unipolare fa muovere il motore di un passo completo. La tabella delle transizioni mostra le sequenze di commutazione dei transistor per ogni passo.
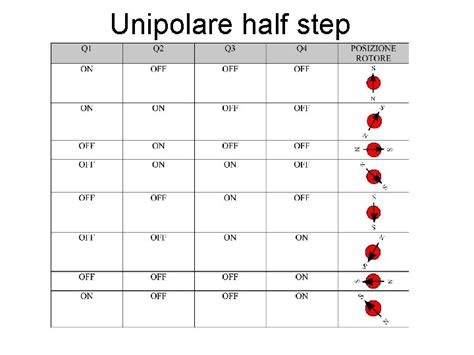
- Half-Step: La modalità half-step raddoppia la risoluzione del movimento, poiché vengono considerati anche gli stati in cui viene alimentata una sola fase. Questo porta a otto possibili stati attivi per il driver, risultando in un movimento più fluido e in una maggiore precisione di posizionamento. Tuttavia, l'alimentazione di una sola fase comporta una coppia minore erogata dal motore.
La scelta tra full-step e half-step dipende dai requisiti specifici dell'applicazione in termini di precisione, fluidità e coppia richiesta.
Controllo e Profili di Accelerazione
Il controllo dei motori passo-passo viene generalmente realizzato tramite circuiti elettronici, come computer, PLC o microcontrollori. L'invio di una sequenza opportuna di impulsi di corrente al driver permette di controllare la posizione e la velocità del motore. È possibile ottenere azionamenti di precisione controllati da computer in catena aperta, senza la necessità di sensori di posizione o velocità, a condizione che il motore sia dimensionato correttamente per l'applicazione.
Quando si parla di profili di movimento, è fondamentale distinguere tra profili ad accelerazione costante (velocità lineare) e profili ad accelerazione lineare.
- Profili ad Accelerazione Costante: Questi profili richiedono un calcolo relativamente semplice del tempo di aggiornamento degli impulsi da inviare al driver. La variazione dell'accelerazione modifica solo il tempo di aggiornamento, ma non la tabella delle transizioni. Questa semplicità di implementazione, unita a prestazioni adeguate, rende questo tipo di controllo il più utilizzato.
- Profili ad Accelerazione Lineare: Richiedono uno sforzo computazionale maggiore, poiché, oltre al tempo, è necessario ricalcolare la tabella delle transizioni ad ogni variazione dell'accelerazione. Sebbene possano offrire prestazioni superiori in determinate situazioni, la complessità implementativa ne limita l'adozione diffusa.
L'utilizzo di piattaforme come Arduino, abbinate a driver come l'L293D, semplifica notevolmente la programmazione e il controllo di motori passo-passo, anche per applicazioni complesse. La scrittura di uno "sketch" permette di impostare facilmente parametri come il numero di passi per giro, i pin del driver collegati al microcontrollore e la velocità di rotazione.
Usare un motore passo passo (stepper motor) con Arduino - #61
Il Motore Passo-Passo ad Albero Tagliato: Innovazione e Vantaggi
La vera innovazione introdotta dal motore passo-passo ad albero tagliato, come quello proposto da STEPPERONLINE, risiede nella sua particolare configurazione geometrica e nelle sue implicazioni progettuali. Invece di un albero solido tradizionale, questi motori presentano un foro di lavorazione assiale che attraversa il centro del motore, sostituendo la posizione abituale dell'albero.
Le principali caratteristiche tecniche di questo design sono:
- Albero Cavo: L'albero del motore è costituito da un tubo metallico cavo.
- Girante Integrata: La girante, elemento fondamentale per la rotazione, viene installata sulla parete interna del tubo metallico cavo. Questa girante è fissata al cuscinetto interno dell'albero tramite saldatura o altri metodi appropriati.
- Foro Centrale Multifunzionale: Il foro interno, che attraversa l'intero motore, è progettato per essere utilizzato per scopi specifici. Le dimensioni di questo foro interno non sono necessariamente elevate e il suo utilizzo principale è destinato al passaggio di cablaggi, alla trasmissione della luce, o al passaggio di fluidi o aria.
Il design di questo motore ottimizza notevolmente la progettazione meccanica complessiva. La presenza del foro centrale facilita il passaggio dei cavi, eliminando la necessità di percorsi esterni o soluzioni di instradamento più complesse. Questo si traduce in un notevole risparmio di spazio di progettazione e, di conseguenza, in una riduzione dei costi di produzione. Inoltre, la possibilità di far passare altri mezzi attraverso il foro apre a nuove possibilità applicative, come l'integrazione di sensori ottici o sistemi di raffreddamento.
Applicazioni e Specifiche Tecniche
I motori passo-passo, grazie alla loro precisione e affidabilità, trovano impiego in una vasta gamma di settori:
- Robotica: Per il controllo preciso dei movimenti degli arti robotici e dei manipulatori.
- Stampanti 3D: Essenziali per il posizionamento accurato degli assi X, Y e Z durante il processo di stampa.
- Macchine CNC: Fondamentali per il controllo millimetrico degli utensili e del pezzo in lavorazione.
- Montature di Telescopi: Per il puntamento e il tracciamento astronomico di alta precisione.
- Servomeccanismi: In generale, in tutte quelle applicazioni che richiedono un posizionamento angolare o lineare estremamente accurato.
- Dispositivi Medici: Per il controllo di pompe, lettori di campioni e altri strumenti di precisione.
- Automazione Industriale: In sistemi di movimentazione, smistamento e assemblaggio.
Le specifiche tecniche dei motori passo-passo variano in base al modello e alla tipologia. Alcuni esempi includono:
- Modello AT1724-230: NEMA17, 2 fasi, 2.3 ampere, coppia 0.8 NM.
- Modello AT2231-300: NEMA22/23, 2 fasi, 3.0 ampere, coppia 1.8 NM.
- Modello AT2434-420: NEMA24, 2 fasi, 4.2 ampere, coppia 3.0 NM.
Le dimensioni standardizzate, definite dalla "National Electrical Manufacturers Association" (NEMA), come NEMA 08 (20 mm), NEMA 11 (28 mm), NEMA 14 (35 mm), NEMA 17 (42 mm), NEMA 23 (56 mm) e NEMA 34 (86 mm), si riferiscono alle dimensioni meccaniche della flangia del motore, garantendo l'intercambiabilità e la compatibilità con diversi sistemi di montaggio.
Limiti e Considerazioni Operative
Nonostante la loro versatilità, i motori passo-passo presentano alcune limitazioni. La loro velocità di rotazione massima è generalmente intorno ai 1000-1500 rpm, sebbene motori speciali con sistemi di retroazione ad anello chiuso possano raggiungere i 4000-5000 rpm. Inoltre, i motori passo-passo non sono adatti per applicazioni che richiedono velocità di rotazione estremamente elevate e costanti, come quelle presenti negli Hard Disk Drive (HDD). Negli HDD, dove le velocità possono variare dai 7200 ai 15000 rpm, si utilizzano motori brushless e attuatori lineari per il movimento delle testine di lettura.
Un altro aspetto da considerare è la generazione di calore. Sebbene i motori passo-passo generino meno calore rispetto ad altri tipi di motori elettrici, specialmente quando vengono utilizzati in modalità microstepping o con un sistema di controllo a riposo che riduce la corrente, un funzionamento prolungato sotto carico elevato può comunque portare a un riscaldamento significativo. È quindi importante garantire un'adeguata dissipazione del calore nell'ambiente operativo.
I tempi di funzionamento dei motori passo-passo variano in base a diversi fattori, tra cui il carico, la temperatura ambiente, il tipo di controllo e la qualità costruttiva del motore. In condizioni operative normali, questi motori sono progettati per un funzionamento continuo e possono raggiungere anche 20.000 ore di vita.
Conclusioni Parziali sull'Albero Tagliato
Il concetto di albero tagliato nei motori passo-passo rappresenta un'evoluzione significativa, soprattutto per quelle applicazioni dove l'integrazione di cablaggi o altri elementi attraverso l'asse motore è un requisito fondamentale. Questa soluzione non solo semplifica l'assemblaggio e riduce l'ingombro, ma apre la porta a design più compatti e funzionali, rispondendo alle crescenti esigenze di miniaturizzazione e integrazione dei sistemi automatizzati. La capacità di far passare cavi, fibre ottiche o persino condotti per fluidi all'interno dell'albero motore stesso, mantenendo al contempo le caratteristiche di precisione e affidabilità tipiche dei motori passo-passo, rende questa configurazione particolarmente promettente per il futuro dell'automazione.
Il continuo sviluppo di motori passo-passo, incluse le varianti con albero tagliato, sottolinea l'importanza di questa tecnologia nell'innovazione dei sistemi di controllo del movimento. La loro capacità di offrire posizionamento preciso, controllo in catena aperta e un buon rapporto costo-prestazioni li manterrà, senza dubbio, al centro di molteplici applicazioni tecnologiche avanzate.