
La Massima Velocità del Manipolatore Cartesiano: Un'Analisi Approfondita
Quando si parla di robot, occorre riferirsi a categorie specifiche, poiché le tipologie in cui si dividono sono tante e diverse. Tra queste, il robot cartesiano si distingue per la sua semplicità strutturale e la sua capacità di operare lungo assi ortogonali. Questo articolo si propone di esplorare in dettaglio il funzionamento, le caratteristiche e, in particolare, la velocità massima raggiungibile da questi manipolatori, analizzando i fattori che ne influenzano le prestazioni e le applicazioni in cui eccellono.
Cos'è un Robot Cartesiano e Come Funziona
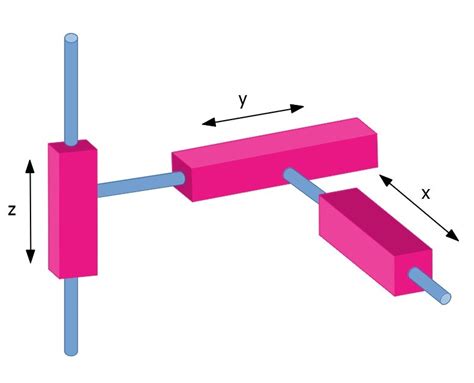
Il robot cartesiano è il robot che si muove in linea retta lungo un sistema di coordinate cartesiane: gli assi x, y e z del piano. Il piano cartesiano è così chiamato dal matematico e filosofo francese René Descartes (Cartesio) che, a metà del Seicento, a partire dagli studi del matematico Nicola d’Oresme, ne dimostrò l’utilità. È composto da due rette, x e y, perpendicolari tra loro e orientate dal punto in cui si incrociano, chiamato origine. È un sistema di riferimento che consente di individuare la posizione di qualsiasi punto nello spazio, calcolandone le coordinate in base alla distanza dalle due rette: la retta x, ovvero l’asse orizzontale delle ascisse, e la retta y, ovvero l’asse verticale delle ordinate. Se alle due rette x e y si aggiunge l’asse z della profondità, anche questo orientato perpendicolarmente agli altri due rispetto all’origine, si ottiene un sistema di riferimento tridimensionale.
Questo sistema è alla base dei movimenti del robot cartesiano: l’asse x è il movimento “avanti o indietro”, l’asse y quello “sopra o sotto”, l’asse z “dentro o fuori”. La normativa ISO 8373:2012 definisce un robot industriale come un dispositivo manipolatore a controllo automatico, con almeno tre assi, riprogrammabile e multiuso, che può essere in posizione fissa o mobile e viene utilizzato per l’automazione industriale: il robot cartesiano, che si muove in maniera coordinata su tre assi ed è programmato e gestito da software PLC o CNC, rientra in questa definizione.
I robot cartesiani vengono utilizzati nel posizionamento e nell’assemblaggio di componenti elettroniche, quindi nelle operazioni di carico e scarico continuo (pick and place) di pezzi sulla linea di produzione e nella logistica. Un robot viene detto manipolatore perché agisce in un ambiente attraverso movimenti programmati. Come tutti i robot, anche il robot cartesiano è formato da uno o più corpi rigidi collegati da giunti: da un estremo si trova la base, fissa al pavimento o mobile, e all’altro estremo si trova l’end effector, l’utensile specifico che effettua l’azione per cui il robot è stato programmato: una fresa per il taglio, un trapano per l’assemblaggio, una pinza per la presa e il posizionamento dell’oggetto. La porzione di spazio su cui può agire l’end effector viene detta spazio di lavoro.
I giunti, cioè i collegamenti tra i corpi rigidi del robot, possono essere prismatici o rotoidali: i prismatici permettono il movimento lineare, facendo scivolare le due parti interconnesse; i rotoidali il movimento rotatorio, facendoli ruotare su uno specifico asse. La particolarità dei robot cartesiani è che hanno solo giunti prismatici per i movimenti principali: possono quindi muoversi solo in linea retta sui tre assi.
Un robot cartesiano completo è formato da: corpi rigidi (assi e telaio di supporto), motore (a induzione con inverter, motore passo-passo a corrente continua, servomotori brushless), sensori, attuatori, un quadro elettronico con software di comando e controllo (PLC o CNC) e un’interfaccia uomo-macchina HMI, anche touchscreen. A volte il motore è posizionato sul carrello per corse più lunghe sull’asse x.
Tipi di Robot Cartesiani e Caratteristiche Distintive
I robot hanno al massimo sei gradi di libertà di movimento, tre di traslazione e tre di rotazione: i robot cartesiani, che si muovono attraverso due o tre giunti prismatici, si caratterizzano quindi per un massimo di tre gradi di libertà di traslazione lineare. A questi, si aggiungono a volte ulteriori gradi di libertà se nell’end effector vengono inseriti giunti rotoidali. I robot cartesiani classici possono essere a due o a tre assi, ma non tutti i robot che si muovono su due o tre assi sono cartesiani.
Un esempio sono le slitte XY, i sistemi a scorrimento incrociato, che hanno gli assi x e y centrati l’uno sull’altro e il carico spesso centrato sull’asse y. I robot cartesiani, invece, hanno l’asse y o z “a sbalzo”, cioè sporgente e collegato all’asse sottostante solo da una estremità, con una differente portata di carico. La caratteristica dell’asse “a sbalzo” differenzia i robot cartesiani anche dai robot gantry o a portata, costruiti su due assi di base x e l’asse y che li attraversa, per una migliore sopportazione del carico ma una minore dimensione dello spazio di lavoro. Non è raro, comunque, che i gantry vengano ricompresi tra i robot cartesiani, anche ad assi maggiori di tre.
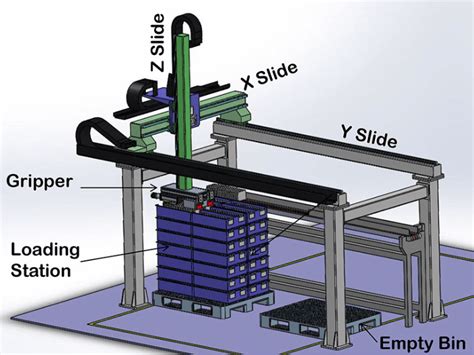
I robot a portale, noti anche come “gantry”, sono costituiti da una struttura a ponte, con l’asse Y supportato da due assi X paralleli. Questa configurazione, pur offrendo una maggiore capacità di sopportazione del carico, limita la dimensione dello spazio di lavoro rispetto a un robot cartesiano standard con asse a sbalzo. I robot a colonna hanno una struttura verticale, con l’asse Z montato su una colonna fissa e gli assi X e Y su un carrello mobile. I robot a tavola hanno gli assi X e Y montati su una base fissa, mentre l’asse Z è montato su un carrello mobile.
I robot cartesiani sono una soluzione sempre più diffusa nell’automazione industriale, grazie alla loro versatilità, precisione e affidabilità. I robot cartesiani sono costituiti da una serie di componenti fondamentali che ne determinano le prestazioni e la flessibilità. Gli assi lineari sono il cuore dei robot cartesiani, responsabili del movimento lungo le direzioni X, Y e Z. La scelta del sistema di movimentazione dipende da fattori come la velocità, l’accelerazione, la precisione e il carico richiesti. Per movimentare gli assi lineari, i robot cartesiani utilizzano motori elettrici, tipicamente servomotori brushless o motori passo-passo. Gli azionamenti sono i dispositivi elettronici che pilotano i motori, fornendo la potenza e il controllo necessari. Il sistema di controllo è il “cervello” del robot cartesiano, responsabile della pianificazione e dell’esecuzione dei movimenti. I sensori sono essenziali per il funzionamento del robot, fornendo feedback sulla posizione, la velocità e l’accelerazione degli assi. Gli end-effector sono i dispositivi montati sull’estremità del robot, che interagiscono direttamente con i pezzi da manipolare o lavorare. La scelta dell’end-effector dipende dalle caratteristiche dei pezzi (forma, dimensioni, peso, materiale) e dalle operazioni da svolgere.
Velocità Massima e Fattori Influenzanti
La velocità massima di un manipolatore cartesiano è un parametro critico che ne determina l'efficienza e l'applicabilità in diversi contesti industriali. Essa non è un valore fisso, ma dipende da una complessa interazione di fattori meccanici, elettronici e software.
In primo luogo, la tipologia di attuazione lineare gioca un ruolo fondamentale. Gli assi basati su cinghie dentate offrono generalmente velocità elevate e accelerazioni rapide, rendendoli ideali per applicazioni di "pick and place" veloci e movimentazione di carichi leggeri. Tuttavia, possono presentare una minore precisione e resistenza all'usura nel tempo rispetto ad altre soluzioni. I sistemi con viti senza fine o a ricircolo di sfere, sebbene potenzialmente più lenti in termini di velocità massima assoluta, garantiscono una maggiore precisione, rigidità e capacità di carico, oltre a una migliore resistenza all'usura. La scelta tra questi sistemi dipende quindi dal compromesso desiderato tra velocità, precisione e durata.
In secondo luogo, la potenza e la tipologia dei motori elettrici sono determinanti. Servomotori brushless ad alta coppia e velocità sono comunemente impiegati per raggiungere prestazioni ottimali. La loro capacità di erogare la coppia necessaria a mantenere velocità elevate, specialmente durante i cambi di direzione o il sollevamento di carichi, è cruciale. Anche la risoluzione del sistema di retroazione (encoder) contribuisce alla precisione del controllo della velocità, permettendo al sistema di mantenere con accuratezza la velocità impostata anche in presenza di disturbi.
Terzo, la massa degli assi e dell'end-effector influisce direttamente sulla dinamica del sistema. Maggiore è la massa da movimentare, minore sarà l'accelerazione e, di conseguenza, la velocità massima raggiungibile per un dato tempo di ciclo. La progettazione di assi leggeri ma robusti, spesso tramite l'uso di materiali compositi o leghe leggere, è una strategia comune per ottimizzare le prestazioni dinamiche.
Quarto, il software di controllo (PLC o CNC) e la programmazione dei movimenti sono essenziali. Algoritmi di controllo avanzati, in grado di gestire in modo efficiente la traiettoria, la velocità e l'accelerazione degli assi, sono indispensabili per massimizzare la velocità senza compromettere la stabilità o la precisione. Le strategie di "look-ahead" e di ottimizzazione delle traiettorie possono permettere al robot di anticipare i cambi di direzione e mantenere una velocità più elevata. La ripetibilità del movimento, ovvero la capacità del robot di ritornare nella stessa posizione più volte con scarti minimi, è un parametro strettamente correlato alla velocità e alla precisione. Un'alta ripetibilità, spesso espressa in centesimi di millimetro, è fondamentale per garantire la qualità dei processi automatizzati.
Infine, le condizioni ambientali e le caratteristiche del carico giocano un ruolo. Temperature elevate possono influenzare le prestazioni dei motori e dei componenti elettronici, mentre la presenza di polvere o umidità può richiedere soluzioni di protezione specifiche che potrebbero limitare leggermente la mobilità. Il peso e la distribuzione della massa del pezzo da manipolare influenzano direttamente la coppia richiesta ai motori e la dinamica dell'intero sistema.
Vantaggi e Applicazioni del Robot Cartesiano
Un robot cartesiano ha un funzionamento semplice, che lo rende economico, personalizzabile, facile da costruire, installare e gestire, nel controllo e nella manutenzione. Ha un design scalabile: la lunghezza, la corsa e il carico di ciascun asse possono essere commisurati in relazione alle esigenze. Nell’era dell’industrializzazione 4.0, l’automazione gioca un ruolo chiave nel potenziare l’efficienza e l’efficacia dei processi produttivi.
I robot cartesiani sono a merito considerati pionieri nell’automazione industriale. La configurazione assiale dei robot cartesiani si rifà direttamente al sistema di riferimento cartesiano introdotto da René Descartes. Il funzionamento dei robot cartesiani si basa sull’uso di motori elettrici, che forniscono la potenza necessaria per il movimento lungo gli assi. Gli attuatori lineari, che possono essere a vite senza fine, a cinghia o pneumatici, convertono questa energia elettrica in forza meccanica lineare. Attraverso l’uso di software specializzati, gli operatori possono definire con precisione traiettorie, velocità e sequenze di operazioni. Questi programmi consentono di impostare parametri dettagliati per ogni movimento, garantendo che il robot esegua il compito assegnato con la massima efficienza e precisione. Il controllo dei movimenti dei robot cartesiani è affidato a sistemi di controllo numerico computerizzato (CNC) o a controller logici programmabili (PLC), che interpretano i comandi del software e li trasformano in azioni precise.
Un ulteriore vantaggio di un robot cartesiano è l’elevata adattabilità. La struttura modulare consente di personalizzare facilmente il robot aggiungendo o rimuovendo componenti, come diversi tipi di effector terminali (pinze, ventose, utensili di taglio, ecc.), per adattarsi a specifiche esigenze produttive. I robot cartesiani trovano impiego in una vasta gamma di applicazioni industriali, grazie alla loro flessibilità e adattabilità. Sono ampiamente utilizzati per la movimentazione e la manipolazione di materiali, come il carico e scarico di macchine utensili, l’alimentazione di linee di produzione, la pallettizzazione e il confezionamento. Nell’assemblaggio e nel montaggio di componenti, i robot cartesiani offrono una soluzione flessibile e precisa. Possono essere equipaggiati con diversi end-effector, come pinze o avvitatori, per manipolare e assemblare parti di varie forme e dimensioni. I robot cartesiani trovano applicazione anche nelle lavorazioni meccaniche, come la saldatura, la fresatura, la foratura e la rettifica. Ad esempio, nella saldatura ad arco, i robot cartesiani possono essere equipaggiati con torce di saldatura e sistemi di inseguimento della giunzione, per realizzare cordoni di saldatura precisi e uniformi. I robot cartesiani sono utilizzati anche per l’ispezione e il controllo qualità, grazie alla loro capacità di posizionamento preciso e ripetibile.
La scelta e il dimensionamento di un robot cartesiano richiedono un’attenta analisi dell’applicazione e delle sue esigenze specifiche. Il carico utile è la massa totale che il robot deve essere in grado di movimentare, includendo il peso dell’end-effector e dei pezzi da manipolare. Le velocità operative, ovvero le velocità massime e medie degli assi, devono essere calcolate in base al ciclo di lavoro desiderato e alla distanza da percorrere. In base ai requisiti dell’applicazione e al carico utile, si possono selezionare gli assi lineari e i componenti più adatti, come guide, viti di manovra, motori e azionamenti. L’accuratezza e la ripetibilità sono due parametri fondamentali per valutare le prestazioni di un robot cartesiano. Questi parametri dipendono da fattori come la qualità dei componenti meccanici, la risoluzione dei sensori di posizione, la calibrazione del sistema e le condizioni ambientali.
L'integrazione e la programmazione dei robot cartesiani sono aspetti cruciali per il loro corretto funzionamento e per l’efficienza dell’applicazione. I robot cartesiani devono essere in grado di comunicare con il sistema di controllo e con gli altri dispositivi presenti nella cella di lavoro, come PLC, sensori, attuatori o sistemi di visione. La programmazione dei robot cartesiani può essere effettuata attraverso diversi linguaggi e ambienti di sviluppo, a seconda del sistema di controllo utilizzato. Oltre ai linguaggi di programmazione, sono disponibili software di simulazione e virtual commissioning, che permettono di testare e ottimizzare il programma del robot prima della sua implementazione fisica. I robot cartesiani devono spesso essere integrati con altri sistemi di automazione, come macchine utensili, sistemi di trasporto, magazzini automatici o linee di assemblaggio. Ad esempio, per l’integrazione con una macchina utensile, è necessario definire il layout della cella di lavoro, le traiettorie del robot, i punti di presa e rilascio dei pezzi, e le sequenze di lavoro. La sicurezza è un aspetto fondamentale nell’integrazione e nell’utilizzo dei robot cartesiani. Un’azienda produttrice di elettronica di consumo ha implementato un robot cartesiano a portale per l’assemblaggio automatico di schede elettroniche. Un’azienda di logistica ha introdotto un robot cartesiano a colonna per la pallettizzazione automatica di scatole di diverse dimensioni. Questi sono solo alcuni esempi delle molteplici applicazioni dei robot cartesiani nell’industria.
Il mercato dei robot cartesiani è in continua evoluzione, spinto dall’innovazione tecnologica e dalle crescenti esigenze di automazione dell’industria. I progressi nella scienza dei materiali stanno portando allo sviluppo di componenti più leggeri, resistenti e performanti per i robot cartesiani. Anche le tecnologie di movimento stanno evolvendo, con l’introduzione di nuove soluzioni come le guide lineari a motore lineare o le viti a ricircolo di rulli. L’integrazione dei robot cartesiani con le tecnologie di intelligenza artificiale e di Industry 4.0 apre nuove frontiere per l’automazione adattativa e flessibile. Ad esempio, un robot cartesiano dotato di telecamere e algoritmi di visione artificiale può adattarsi automaticamente a variazioni nei pezzi da manipolare, come differenze di posizione, orientamento o colore. I robot cartesiani trovano applicazione in un numero crescente di settori e processi produttivi, grazie alla loro versatilità e adattabilità. Nonostante i numerosi vantaggi e le prospettive di crescita, l’adozione dei robot cartesiani presenta anche alcune sfide da affrontare. D’altra parte, i robot cartesiani offrono anche numerose opportunità per le aziende e per la società nel suo complesso. In conclusione, i robot cartesiani rappresentano una tecnologia chiave per l’automazione industriale, con un vasto potenziale di applicazione e di benefici per le aziende e per la società. Milioni di robot industriali lavorano nelle fabbriche di tutto il mondo già predisposte per l'Impresa 4.0. Sono utilizzati per aumentare i tassi di produzione, migliorare la qualità, ridurre i costi e supportare operazioni più flessibili e sostenibili.
L'IFR (International Federation of Robotics) ha utilizzato le definizioni contenute nella norma ISO 8373 per identificare diverse classi di robot industriali in base alla loro struttura o topologia meccanica. Il numero di assi è una caratteristica fondamentale dei robot industriali; ogni asse rappresenta un movimento o un grado di libertà indipendente. Un maggior numero di gradi di libertà consente al robot di muoversi in spazi più ampi e complessi. Gli effettori terminali, chiamati anche utensili di fine braccio (EOAT) o "manipolatori multiuso", sono un altro elemento importante nella maggior parte dei robot. Esiste un'ampia gamma di dispositivi di presa, tra cui pinze, strumenti di processo dedicati come avvitatori, spruzzatori di vernice o saldatori e sensori, tra cui telecamere.
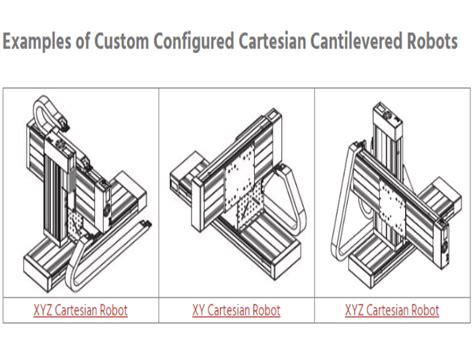
I robot cartesiani, talvolta chiamati robot rettangolari, robot lineari o robot a cavalletto, hanno un manipolatore con tre giunti prismatici i cui assi formano un sistema di coordinate cartesiane. Esiste più di un modo per configurare tre giunti prismatici e, quindi, più di un modo per configurare un robot cartesiano. In una topologia cartesiana di base, tutti e tre i giunti sono ad angolo retto, con uno che si muove sull'asse x, fissato a un secondo che si muove sull'asse y, fissato a un terzo che si muove sull'asse z. Sebbene sia spesso usato come sinonimo di robot cartesiano, la topologia a cavalletto non è identica. Come nel caso di un robot cartesiano di base, i robot a cavalletto supportano movimenti lineari nello spazio tridimensionale. Ma i robot a cavalletto sono configurati con due guide di base per l'asse x, una guida per l'asse y supportata che si estende sui due assi x e un asse z a sbalzo collegato all'asse y.
I robot cartesiani sono ideali per applicazioni che richiedono movimenti lineari precisi e ripetibili, come l'assemblaggio di componenti elettronici, il carico e scarico di macchine utensili, la pallettizzazione e il confezionamento. La loro struttura modulare e la facilità di programmazione li rendono una scelta economica ed efficiente per un'ampia varietà di compiti nell'automazione industriale.
La velocità massima di un manipolatore cartesiano è un parametro che, sebbene non esista un valore univoco, è intrinsecamente legato alla qualità dei componenti meccanici, alla potenza dei motori, all'efficacia del sistema di controllo e alla massa totale da movimentare. L'ottimizzazione di questi fattori consente di raggiungere prestazioni sempre più elevate, ampliando ulteriormente il campo di applicazione di questa versatile tipologia di robot.
tags: #che #velocita #puo #raggiungere #un #manipolatore